PEG buoydesign--tjl: Buoy view (xupdf) redesign
| Author: | Tuomas J. Lukka |
|---|---|
| Last-Modified: | 2003-08-11 |
| Revision: | 1.7 |
| Status: | Incomplete |
This PEG attempts to define a flexible framework for FenPDF and related designs.
Issues
Who creates the nodes? What about when a node contains a link to itself? Are all nodes really the same?
RESOLVED: A-ha! There was confusion because the first design treated buoy nodes and main nodes the same, when they are not at all the same.
The buoy nodes know how to render themselves at a given anchor.
The main node has a cursor and handles events etc.
The buoy node objects can be static objects; the main node objects must be created for each view.
Architecture
The abstract buoy data model
First of all, define the abstract buoyview model as follows:

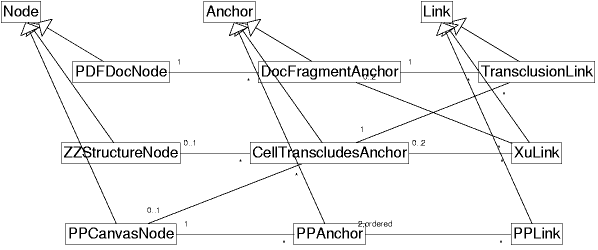
In PP, a node is a 2D canvas on which there are cells, and Anchors are zz cells and links are connections between clones of anchor cells on a particular dimension.
In xupdf, a node is a cell containing a PDF document, and the anchors and links are defined implicitly by the xanalogical transclusions and xulinks.
A PDF scrollblock, on the other hand, is very different: no cell, no cellview! The architecture needs to support all these.
The Main Interfaces
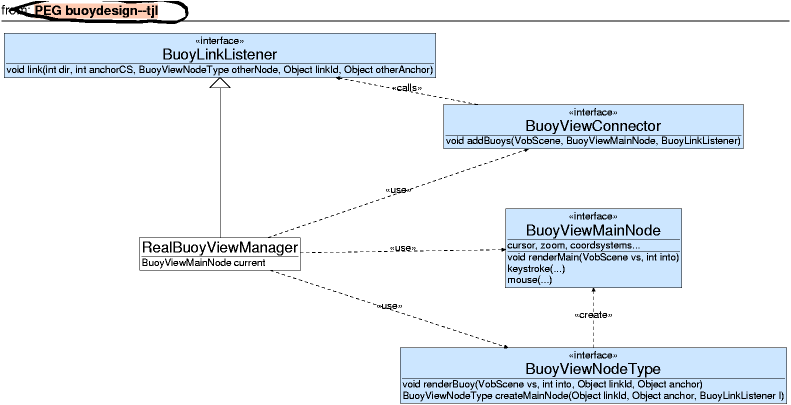
Now, the picture gets clearer: the whole structure of the current buoy view should be defined by a single facade:
Important Invariant (a la ZZstructure dimension): if node A, anchor A.1 shows a link X to node B anchor B.4, hen after B.setFocus(B.4), node B will show the link X as well.
The linkId passed to BuoyLinkListener must be unique for each node and the identifies the link -- it must be the same in both directions. The previous invariant in code is an invariant which these interfaces must obey:
// mainnode1's BuoyLinkListener set to l. mainnode1.renderMain(...); connector.addBuoys(...); // l.link(d, *, nodetype2, L, A) got called as callback mainnode2 = nodetype2.createMainNode(L, A, l) mainnode2.renderMain(...); connector.addBuoys(...); // l.link(-d, *, nodetype1, L, B) MUST GET CALLED
Of course, if the underlying data structure is modified between the calls to renderMain, the invariant need no longer hold.
The coordsys the main view is being rendered into defines the extent by its (modified) unit square; this extent is not binding but more like a hint.
Matcher structure can separate left&right links and know which way
Now, to make things clear, the call sequence for RealBuoyViewManager is
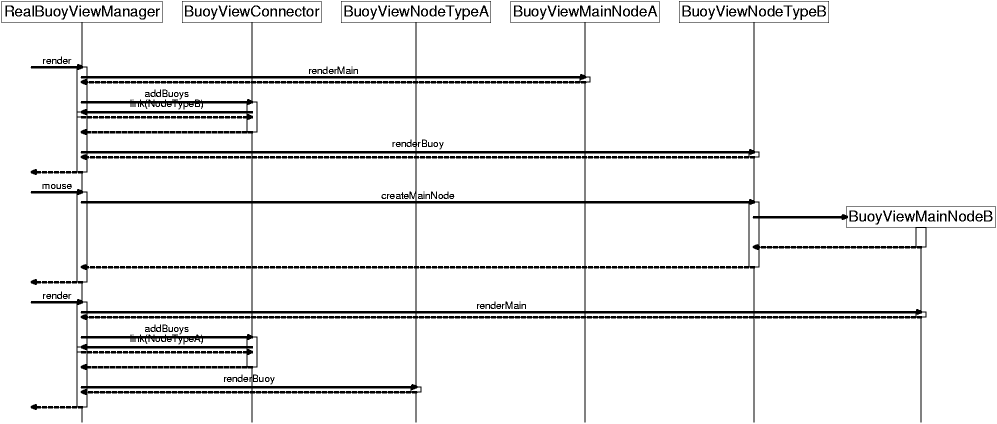
In the diagram, we first see RealBuoyViewManager render the view, calling BuoyViewMainNodeA to render the main node and getting a callback through the BuoyLinkListener interface about a link. This causes it to call BuoyViewNodeTypeB to render the buoy.
Then, the mouse click comes which takes the focus to the buoy of type B. Its node type object is called to create the new focus object. Then, the render pattern is repeated, but now with BuoyViewMainNodeB in the focus.
Varying geometries
It is possible (e.g., FenPDF has this) that different main nodees require different geometries for the buoys.
Let's list the design pressures:
- The size of the area reserved for the buoy view has to be changeable easily (e.g., in FenPDF, scrolling the separator)
- The sizes and geometries should be set centrally, pluggably, not hardcoded to the different view
- The geometries depend on the main node type, but not on the content (at least yet).
- Different connectors should be able to have different buoy geometries (think, e.g., about normal structlink buoys in fenpdf vs. the treetime buoys)
So, the solution is to provide the buoymanager different geometry managers, multiplexed between main node types and buoy types. There are three different geometry managers, one for the main view and two for the buoys. The buoys' geometry management is split into Sizer, which decides how large the buoy should be, and Geometer, which places it.
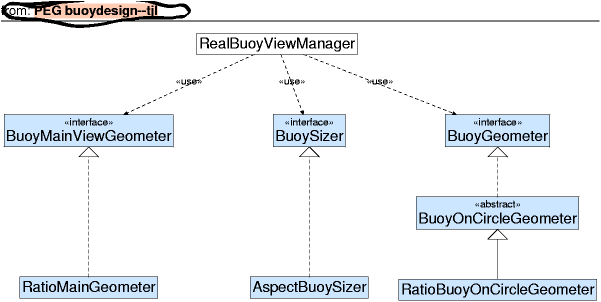
Both may be called two ways: to create the coordinate systems, or just to set the changed coordinates.
Here's the geometer for the main views:
public interface BuoyMainViewGeometer {
/** Create or set the main coordinate system size.
* @param into The matching parent and parent, giving the rectangle into
* which to place the cs.
* @param key The key to use for the returned coordinate system
* in into. There may be others in between.
* @param create Whether to create the coordinate systems or just set parameters
* in existing ones.
* @return The coordinate system into which to place the main view.
*/
int mainCS(VobScene vs, int into, Object key, boolean create);
}
And here's the geometer for the buoys:
public interface BuoyGeometer {
/** Create any parameter coordinate systems depending on the surrounding
* rectangle.
* This method **may** set state inside the BuoyGeometer.
* @param into The matching parent and parent, giving the rectangle in
* which the whole buoyview and mainview are placed.
* @param create Whether to create the coordinate systems or just set parameters
* in existing ones.
*/
void prepare(int into, boolean create);
/** Create or set the main coordinate system size.
* @param into The matching parent and parent, giving the rectangle in
* which the whole buoyview and mainview are placed.
* @param anchor The coordinate system of the anchor, or -1 if not applicable.
* @param direction 1 for right, -1 for left.
* @param key The key to use for the returned coordinate system
* in into. There may be others in between.
* @param index The index of the buoy (counted from the anchor)
* @param total The total number of buoys from the anchor
* (might be inaccurate)
* @param w,h The size the buoy box should be closest
* to the focus.
* @param scale The scale that should be applied to the w, h at
* focus
*
*/
int buoyCS(VobScene vs, int into, int anchor,
int direction,
Object key,
int index, int total,
float w, float h, float scale);
}
Before the previous interface is called, the buoy size is found out from the buoy sizer interface:
public interface BuoySizer {
/** Get the size and scale
* a buoy should be shown at (at its maximum,
* nearest to the focus),
* @param w The pixel width desired by the buoy
* @param h The pixel height desired by the buoy
* @param whout The output width and height
* @return The scale to use (width and height are *before*
* scaling, i.e. (400,400) and .5 means real size (200,200)
*/
float getBuoySize(float w, float h, float[] whout);
}