Libvob input framework for custom controllers
How to read joysticks and custom controllers built from LEGO(r) bricks.
Introduction
Among other things, we are building custom controllers out of LEGO(r) bricks by connecting them to optomechanical USB computer mice. This allows the easy conversion of mechanical motion to digital input. Inside the computer, we need to make it easy to access the axes as well.
Requirements
Input types
We want to know the current positions of different controllers. There are up to three axes per controller attached to x, y and mouse wheel.
To make things difficult, there are different types of axes:
- limited, with friction (i.e. remaining where the user set it).
- limited, with tension (i.e. returning to center, like a joystick).
- unlimited, with friction (i.e. a mouse wheel: infinite length)
There are also different uses for the axes inside:
- to control the value of some parameter absolutely, so the position should be converted to an absolute number between 0 and 1. An event should be sent whenever the number changes, but noise should be filtered.
- to control a first derivative, so there should be a null zone and outside it, events should be sent at some reasonable interval containing the integral (?) of the value.
- to control the value of some parameter relatively, with infinite variability (i.e. angle of rotation, which wraps at 360 degrees). Should be scaled appropriately. May be useful to offer acceleration support.
Now, the usual (but not only) way to map the axes to meanings is to use "limited, with friction" for absolute values, "limited with tension" for first derivatives and "unlimited, with friction" for relative control.
There are, of course, also connected 2D axes but as those are dealt with by existing mice &c, we will concentrate on single, independent axes.
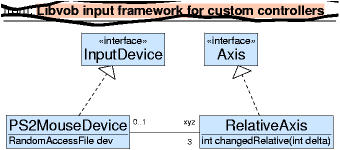
Input devices
Need to support both axes received from mice and actual joysticks.
The system has to be extensible to several input devices.
Calibration
The calibration process needs to be trivial: press a key, wriggle the device to extreme positions, and press another key.
When several input devices are used, they should detect among themselves, which ones of them the user is trying to calibrate.
Getting information
Each input device should define names and characteristics for the axes, for programs to show the user what can be connected to what.
Design of the interfaces
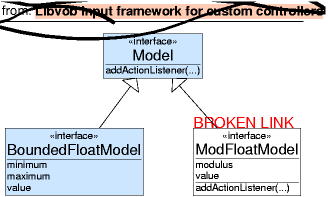
Models
The *Model classes are a central piece of the API. This is a design similar to swing: for each controlled "thing" there is a Model object which implements a relevant interface. This allows us to, e.g., use special models in Jython code so that the variable controlled is actually directly an object attribute - the intent is to use this code in vob.putil.demokeys.
Axes
The models are connected to the axes through absolute and relative axis listeners:
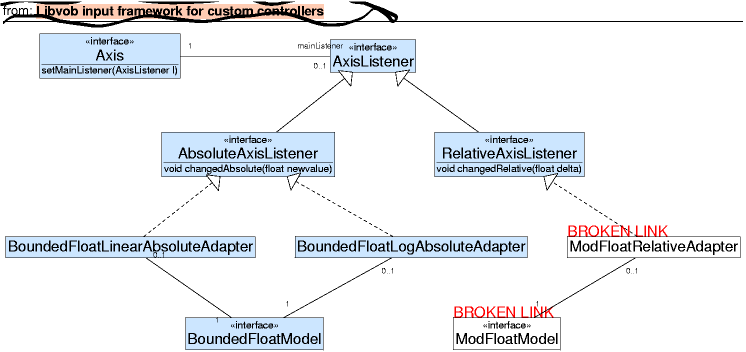
There can only be one main model per axis - to not confuse the user. If desired, we may later add the capability to put in "non-main" listeners, but this is not a priority.
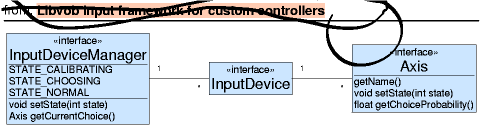
Input devices
The input devices, on the other hand, are represented by a central class which allows programs to access the currently configured input devices: InputDeviceManager. From this class, users may get instances of the InputDevice class. This class also contains the methods for beginning and ending calibration and choosing axes by moving them. The InputDevice classes again allow users to get the axes.